허프 변환(hough transform)
허프 변환 이란 영상에서 추출한 에지 정보를 이용하여 직선 또는 원을 검출하는 방법을 말한다.
컴퓨터 비전에서 직선 검출 하기 위해 주로 허프 변환 기법을 사용한다.
허프 변환 기법이란 2차원 xy 좌표에서 직선의 방정식을 파라미터(parameter) 공간으로 변환하여 직선을 찾는 알고리즘이다.
허프 변환 직선 검출
직선은 영상에서 찾을 수 있는 많은 특징 중 하나이며 영상을 분석함에 중요한 정보를 제공한다.
직선 검출은 자율 주행 자동차에서 차선을 검출하는 용도로 사용할 수도 있고,
수평이 맞지 않는 영상에서 수평선이나 수직선 성분을 찾아내어 자동 영상 회전을 위한 정보로도 사용할 수 있다.
영상에서 직선 성분을 찾기 위해 우선 에지(edge)를 찾아내고, 에지 픽셀들이 일직선상에 배열되어 있는지 확인한다.
영상에서 직선을 찾기 위한 용도로 허프 변환 기법이 널리 사용된다.
보통 2차원 평면에서 직선의 방정식은 다음과 같은 식으로 나타낸다.

수식에서 a는 기울기(slope), b는 y 절편(y intersection)이다.
이 방정식은 가로축이 x, 세로축이 y인 2차원 xy좌표 공간에서 정의되었고,
a와 b는 직선의 형태를 결정하는 파라미터이다.
허프 변환을 이용하여 직선의 방정식을 찾으려면 xy 공간에서 에지로 판별된 모든 점을 이용하여
ab파라미터 공간에 직선을 표현하고, 직선이 많이 교차되는 좌표를 모두 찾아야 한다.
이때 직선이 많이 교차하는 점을 찾기 위해 보통 축적 배열(accumulation array)를 많이 사용한다.
축적 배열은 0으로 초기화된 2차원 배열에서 직선이 지나가는 위치의 배열 원소 값을 1씩 증가시켜 생성한다.
허프 변환 함수
OpenCV에서 허프 변환의 직선 검출을 위한 함수를 제공한다.
void HoughLines(InputArray Image, OutputArray lines, double rho, double theta, int threshold,
double srn = 0, double stn = 0, double = min_theta = 0, double max_theta = CV_PI);
image : 8비트 단일 채널 입력 영상으로 주로 에지 영상을 지정한다.
lines : 직선 정보(rho, theta)를 저장할 출력 벡터
rho : 축적 배열에서 p 값의 해상도(픽셀 단위)
theta : 축적 배열에서의 해상도(단위는 라디안)
threshold : 축적 배열에서 직선으로 판단할 임계값
srn : 멀티스케일 허프 변환에서 rho 해상도를 나누는 값
stn : 멀티스케일 허프 변환에서 theta 해상도를 나누는 값
min_theta : 검출할 직선의 최소 theta 값
max_theta : 검출할 직선의 최대 theta 값
HoughLines() 함수는 image 영상에서 0이 아닌 픽셀을 이용하여 축적 배열을 구성한다.
직선 파라미터 정보에 받아 올 lines 인자에는 vector<Vec2f> 또는 vector<Vec3f> 자료형 변수를 지정한다.
예제 코드
#include "opencv2/opencv.hpp"
#include <iostream>
using namespace cv;
using namespace std;
int main()
{
Mat src = imread("C:/opencv/ch02/Project1/capture.jpg", IMREAD_GRAYSCALE);
Mat edge;
Canny(src, edge, 50, 150); // 캐니 에지 검출기를 이용하여 영상을 edge에 저장
vector<Vec2f> lines;
HoughLines(edge, lines, 1, CV_PI / 180, 250); // 직선의 방정식 파라미터를 lines에 저장
Mat dst;
cvtColor(edge, dst, COLOR_GRAY2BGR);
for (size_t i = 0; i < lines.size(); i++) {
float r = lines[i][0], t = lines[i][1];
double cos_t = cos(t), sin_t = sin(t);
double x0 = r * cos_t, y0 = r * sin_t;
double alpha = 1000;
Point pt1(cvRound(x0 + alpha * (-sin_t)), cvRound(y0 + alpha * cos_t));
Point pt2(cvRound(x0 - alpha * (-sin_t)), cvRound(y0 - alpha * cos_t));
line(dst, pt1, pt2, Scalar(0, 0, 255), 2, LINE_AA);
}
imshow("src", src);
imshow("dst", dst);
waitKey();
return 0;
}
실행 결과
Point pt1과 pt2를 이용하여 직선상의 두 점 좌표를 구한다.
이 때 alpha 값을 작게 설정하면 직선의 일부만 그려져 주의해야 한다.

확률적 허프 변환(probabilistic Hough transform)
OpenCV에서는 기본적인 허프 변환 직선 검출 방법 외 확률적 허프 변환에 의한 검출 방법도 제공한다.
확률적 허프 변환 방법은 직선의 방정식 파라미터를 반환하는 것이 아니라 직선의 시작점과 끝점 좌표를 반환한다.
즉, 선분을 찾는 방법이다.
void HoughLinesP(InputArray Image, OutputArray lines, double rho, double theta, int threshold,
double minLineLength = 0, double maxLineGap = 0);
image : 8비트 단일 채널 입력 영상으로 주로 에지 영상을 지정한다.
lines : 선분의 시작점과 끝점의 정보(x1, y1, x2, y2)를 저장할 출력 벡터
rho : 축적 배열에서 값의 해상도(픽셀 단위)
theta : 축적 배열에서의 해상도(단위는 라디안)
threshold : 축적 배열에서 직선으로 판단할 임계값
minLineLength : 검출할 선분의 최소 길이
maxLineGap : 직선으로 간주할 최대 에지 점 간격
HoughLinesP() 함수에서 검출된 선분 정보가 저장되는 lines 인자에는 보통 vector<Vec4i> 자료형 변수를 지정한다.
각각의 선분 정보는 Vec4i 자료형으로 저장되고, 하나의 Vec4i 객체에는 선분 시작점의 x 좌표와 y 좌표, 선분 끝점의 x 좌표와 y 좌표가 저장된다.
maxLineGap 인자는 일직선상의 직선이 잡음 등의 영향으로 끊어져 있을 때 두 직선을 하나의 직선으로 하고자 할 때 사용한다.
예제 코드
#include "opencv2/opencv.hpp"
#include <iostream>
using namespace cv;
using namespace std;
int main()
{
Mat src = imread("C:/opencv/ch02/Project1/capture.jpg", IMREAD_GRAYSCALE);
Mat edge;
Canny(src, edge, 50, 150);
vector<Vec4i> lines;
HoughLinesP(edge, lines, 1, CV_PI / 180, 160, 50, 5);
Mat dst;
cvtColor(edge, dst, COLOR_GRAY2BGR);
for (Vec4i l : lines) {
line(dst, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(0, 0, 255), 2, LINE_AA);
}
imshow("src", src);
imshow("dst", dst);
waitKey();
return 0;
}
실행 결과

허프 변환 원 검출
허프 변환을 이용하여 원을 검출할 수 있다. 검출 방식은 아래와 같은 수식으로 정의한다.

중심 좌표가 (a, b)이고 반지름이 r인 원의 방정식 표현 방법이다.
이러한 원의 방정식은 3개의 파라미터를 가지고 있다.
허프 변환을 그대로 적용하려면 3차원의 파라미터 공간에서 축적 배열을 정의하고 가장 누적이 많은 위치를 찾아야 한다.
3차원 파라미터 공간에서 축적 배열을 정의하고 사용하려면 많은 메모리와 연산 시간을 필요로 한다.
그래서 OpenCV에선 일반적인 허프 변환 대신 허프 그래디언트 방법을 사용하여 원을 검출한다.
검출 방법
허프 그래디언트 방법은 2단계로 구성된다.
1단계 : 영상에 존재하는 모든 원의 중심 좌표를 찾는다.
2단계 : 검출된 원의 중심으로부터 원에 적합한 반지름을 구한다.
1단계에서 축적 배열이 사용된다.
허프 그래디언트 방법에서 사용하는 축적 배열은 파라미터 공간에서 만드는 것이 아닌 동일한 xy 좌표 공간에서 2차원 배열로 만든다.
원의 중심을 찾기 위해 허프 그래디언트 방법은 입력 영상의 모든 에지 픽셀에서 그래디언트를 구하고,
그래디언트 방향을 따르는 직선상의 축적 배열 값을 1씩 감소시킨다.
원주상에 모든 점에 대해 그래디언트 방향의 직선을 그리고, 직선상의 축적 배열 값을 증가시키면
원의 중심 위치에서 축적 배열 값이 크게 나타난다.
원의 중심을 찾은 후 다양한 반지름의 원에 대해 원주상에 충분히 많은 에지 픽셀이 존재하는지 확인하여
적절한 반지름을 선택한다.
OpenCV에서는 원을 검출하는 함수를 제공한다.
void HoughCircles(InputArray image, OutputArray circles, int method, double dp, double minDist,
double param1 = 100, double param2 = 100, int minRadius = 0, int maxRadius = 0);
image : 입력 영상으로 에지 영상이 아닌 원본 그레이스케일 영상 지정
circles : 검찰된 원 정보를 저장할 출력 벡터
method : HOUGH_GRADIENT만 지정 가능
dp : 입력 영상과 축적 배열의 크기 비율
minDist : 인접한 원 중심의 최소 거리
param1 : Canny 에지 검출기의 높은 임계값
param2 : 축적 배열에서 원 검출을 위한 임계값
minRadius : 검출할 원의 최소 반지름
maxRadius : 검출할 원의 최대 반지름
HoughCircles() 함수에는 원본 그레이스케일 입력 영상을 전달한다. 그러면 함수 내부에서 Sobel() 함수와 Canny() 함수를 이용하여
그래디언트와 에지 영상을 계산한 후 허프 그래디언트 방법으로 원을 검출한다.
circles 인자에는 보통 vetor<Vec3f> 또는 vector<Vec4f> 자료형 변수를 지정한다.
dp 인잔느 사용할 축적 배열의 크기를 결정하는 용도로 사용되는데, 1로 지정하면 입력 영상과 같은 크기의 축적 배열을 사용하고
2를 지정하면 입력 영상의 가로 세로 크기를 2로 나눈 크기의 축적 배열로 사용한다.
minDist 인자는 최소 거리를 지정한다. 두 원의 중심점 사이 거리가 minDist 보다 작으면 두 원 중 1개는 검출하지 않는다.
예제 코드
#include "opencv2/opencv.hpp"
#include <iostream>
using namespace cv;
using namespace std;
int main()
{
Mat src = imread("C:/opencv/ch02/Project1/circle.jpg", IMREAD_GRAYSCALE);
Mat blurred;
blur(src, blurred, Size(3, 3));
vector<Vec3f> circles;
HoughCircles(blurred, circles, HOUGH_GRADIENT, 1, 50, 150, 30);
Mat dst;
cvtColor(src, dst, COLOR_GRAY2BGR);
for (Vec3f c : circles) {
Point center(cvRound(c[0]), cvRound(c[1]));
int radius = cvRound(c[2]);
circle(dst, center, radius, Scalar(0, 0, 255), 2, LINE_AA);
}
imshow("src", src);
imshow("dst", dst);
waitKey();
}
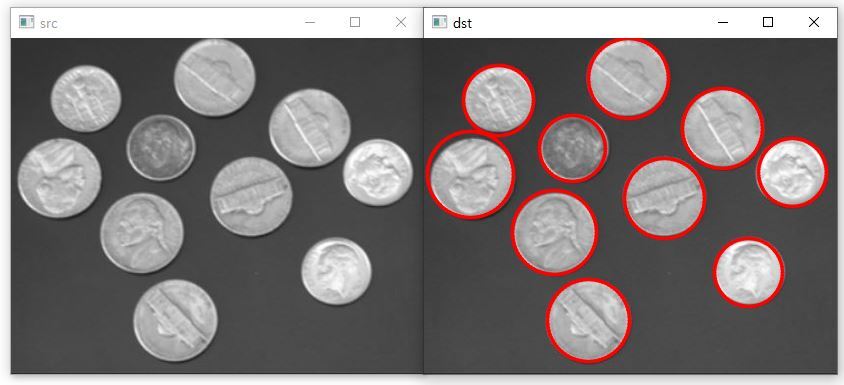
실행 결과
입력 영상 src의 잡음을 제거하는 용도로 blur() 함수를 적용한다.
HourCircles() 함수를 이용하여 원을 검출하고, 검출된 원의 중심 좌표와 반지름 정보는 circles 변수에 저장된다.
'DevelopmentTool > OpenCV' 카테고리의 다른 글
| [OpenCV] 모폴로지 (1) | 2022.11.22 |
|---|---|
| [OpenCV] 영상의 이진화 (0) | 2022.11.22 |
| [OpenCV] 캐니 에지 검출 (0) | 2022.11.22 |
| [OpenCV] 소벨 필터 마스크 에지 검출 방법 (0) | 2022.11.22 |
| [OpenCV] 투시 변환 (0) | 2022.11.22 |